Geometry Optimization - Basic Considerations
How much output is generated during geometry optimization (and actually all other types of Gaussian calculations as well) depends on the beginning of the keyword line:
#P will provide somewhat more detailed output
# will provide normal output
#T will provide somewhat less output
Geometry optimization can be performed in three different types of coordinate systems. Please observe that the way, the geometry is defined in the input file, is actually separate from deciding, in which coordinate system the optimization will be performed:
opt=Z-Matrix will optimize the geometry in internal coordinates (as provided in the input file)
opt or opt=Redundant will optimize the geometry in redundant internal coordinates (chosen automatically)
opt=Cartesian will optimize the geometry in Cartesian coordinates
For all three options, the optimization algorithm will vary the structure of the system until changes in the gradient and the structure on two successive iterations are smaller than prefixed values (convergence criteria). For each step of the geometry optimization, Gaussian will write to the output file a) the current structure of the system, b) the energy for this structure, c) the derivative of the energy with respect to the geometric variables (the gradients), and d) a summary of the convergence criteria.
For all methods used in Gaussian, the energy will be given in atomic units (au). The atomic unit of energy is called Hartree and equates to other energy units as follows:
1 Hartree = 627.15 kcal/mol
1 Hartree = 2625.5 kJ/mol
1 Hartree = 27.2116 eV
1 Hartree = 4.3597482*10-18 J/particle
The energies of molecular systems as calculated by most quantum mechanical methods called ab initio are calculated relative to separate electrons and nuclei. Energies for molecular systems are therefore very large and negative. In the output files the energies are prefaced by "SCF" and the UNIX command grep "SCF" output.file can therefore be used to list all energies contained in a Gaussian output file.
The semiempirical methods available in Gaussian such as AM1, MNDO, or PM3 produce heats of formation (that is, the energy of the system relative to its constituent elements in their standard states at 298.15K and 1 atm (101325 Pa). Heats of formation can be either positive or negative and are comparatively small. By definition the heats of formation of the elements are zero. The heats of formation contained in the Gaussian output file can be listed using grep "Energy= " output.file
The molecular mechanics methods available in Gaussian such as AMBER, Dreiding, and UFF calculate the strain energy relative to an idealized, unstrained state. All terms defining the molecular mechanics energy with the exception of those defining electrostatic interactions are therefore nonbonding or repulsive, the overall strain energy therefore positive. Electrostatic energies can be repusive or attractive. Their inclusion may thus lead to positive or negative molecular mechanics energies. The strain energies contained in the output file can be listed using grep "Energy= " output.file
After each iteration of the geometry optimization, the output files contain a summary of the current stage of the optimization:
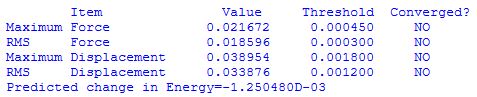
The first two lines contain the maximum remaining force on an atom in the system as well as the average (RMS, root mean square) force on all atoms. In any case of doubt, this information is given in atomic units (here: Hartrees/Bohr and Hartrees/Radians). Together with the actual value for the current structure appears the Threshold value. The third and fourth convergence criteria are the maximum displacement, that is, the maximum structural change of one coordinate as well as the average (RMS) change over all structural parameters in the last two iterations. Once the current values of all four criteria fall below the threshold, the optimization is complete. The convergence criteria can be changed in two different ways:
1) Using the opt keyword
opt without any additional information sets the RMS force criterion to 3*10-4
opt=tight will set the RMS force criterion to 1*10-5 and scale the other three criteria accordingly
opt=verytight will set the RMS force criterion to 1*10-6 and scale the other three criteria accordingly
2) Using the IOP keyword (Internal Option)
iop(1/7=x) will set the RMS force criterion to x*10-6 and scale the other three criteria accordingly. Thus, using iop(1/7=10) one can obtain the same final result as with opt=tight.
Choosing tighter convergence criteria will, of course, give improved results, but will also need more computer time. The default settings are appropriate for small systems. Especially for large structures, however, convergence of the last two criteria can be very slow and it is sometimes advisable to stop optimizations before all four criteria are fulfilled. The maximum number of optimization cycles depends on the size of the system and is automatically adjusted by Gaussian. If a particular setting of optimization cycles is desired, however, this can be specified using
opt=(maxcycles=n)
The default optimization algorithm included in Gaussian is the "Berny algorithm" developed by Bernhard Schlegel. This algorithm uses the forces acting on the atoms of a given structure together with the second derivative matrix (called the Hessian matrix) to predict energetically more favorable structures and thus optimize the molecular structure towards the next local minimum on the potential energy surface. As explicit calculation of the second derivative matrix is quite costly, the Berny algorithm constructs an approximate Hessian at the beginning of the optimization procedure through application of a simple valence force field, and then uses the energies and first derivatives calculated along the optimization pathway to update this approximate Hessian matrix. The success of the optimization procedure therefore depends to some degree on how well the approximate Hessian represents the true situation at a given point. For many "normal" systems, the approximate Hessians work quite well, but in a few cases a better Hessian has to be used. Often it is sufficient to calculate the Hessian matrix explicitly once at the beginning of the calculation and then use the standard updating scheme of the Berny algorithm. This is specified using the
opt=calcfc
keyword. In some very rare cases, the Hessian changes considerably between optimization steps and must then be recomputed after each optimization step using the
opt=calcall
keyword.
In case a number of different options are to be specified for geometry optimization, these options must be given in parenthesis:
opt=(Z-Matrix,calcfc,tight,maxcycles=25)